Arena design
Design 1
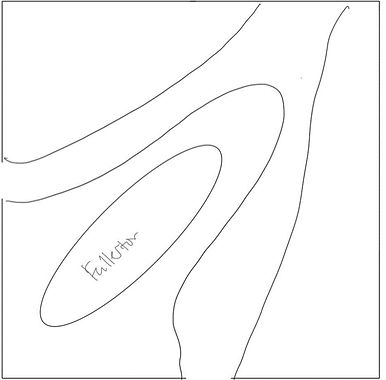
Our initial sketch of our arena consisted of a one-way path involving a ramp. We intended to use a ramp as a form of obstacle, as a way to force other teams alter their speeds accordingly, as well as have a fake exit at the end of the ramp. However, this design was unrealistic as the surrounding road around Fullerton Hotel Singapore does not have a slope and we wanted a more flexible approach in making obstacle.
Design 2
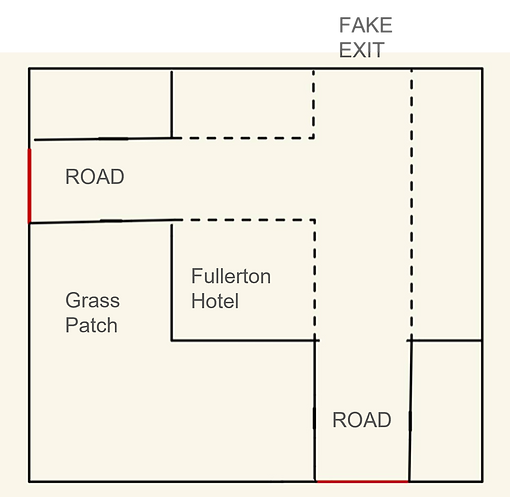
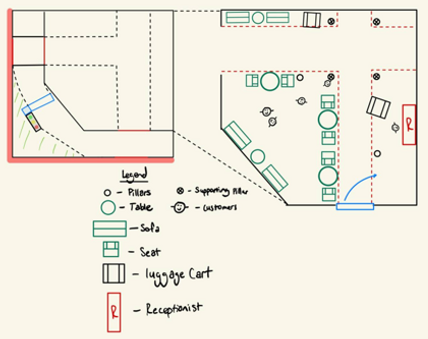
We pivoted our second iteration to a flat ground after consulting with our stakeholders. By introducing a cross junction, we can still keep the fake exits as obstacles and also include more complex designs for the arena. We decided to split the arena into 2 parts, external portion and internal portion, so as to allow more flexibility into the design of obstacles to match the similarity to Fullerton hotel. This design poses space constraints for the robot movements due to its narrow pathway, resulting in a limited selection of physical obstacles to be used.
External Design
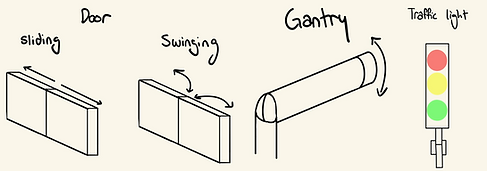
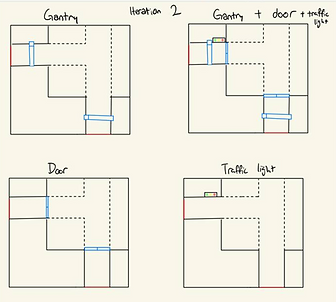
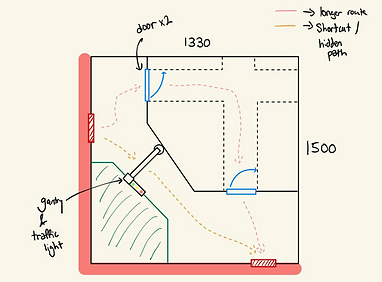
We ideated with obstacles outside the Fullerton Hotel, including sliding gates and gantries with traffic light. This opens up an alternative route for the LIMO robot to navigate, while allowing us to introduce more obstacles.
We are open to many more alternatives regarding our arena design, including electronic components powering our obstacles.
Internal Design
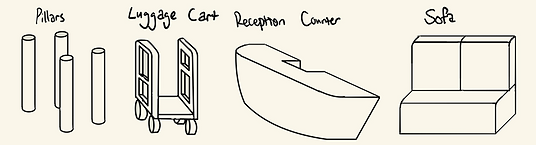
On top of external obstacles, we designed hotel themed obstacles meant for within the original route. We worked around but not limited to luggage carts, reception counters, sofas and building pillars. These may pose as a challenge to the LIMO robot if they do not line up with the LIDAR sensors.
Design 3
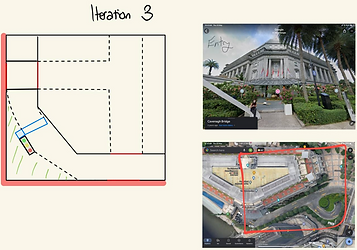
We played around with the idea of an easter egg, allowing some robots to pass through the gantry on a timer. This poses as a threat to other team as it may affect the robot's mapping and navigation.
Our team settled on the design as shown in the following figure. This design will include two routes, one obstructed by a gantry with a traffic light, and the other within the Fullerton Hotel with multiple obstacles and a fake exit.
3D Design 1
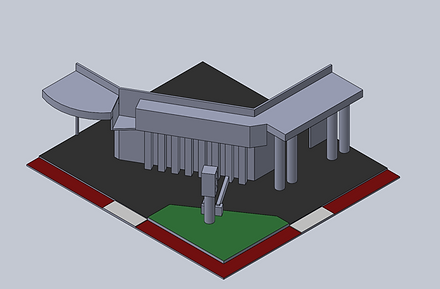
Having finalised our design, we moved on towards 3D modelling for an accurate dimensioning of the pathways and obstacles. This allows us to prepare obstacles we have in mind, while at the same time further iterate any details we might have over/underestimate.
Our initial 3D iteration, accurately represents the dimensions required for the LIMO robot to pass through. During this process, we were also able to gain insight to the height of the LIMO's sensors and if it is able to detect our intended obstacles.
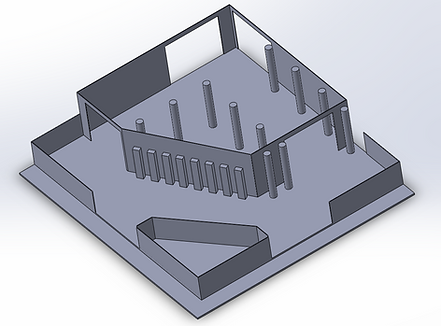
3D Design 2
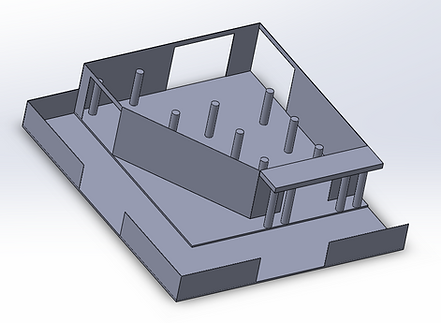
In this version of our 3D model. We have simplified the arena by removing all the aesthetics and decorations for our limo testing purpose.
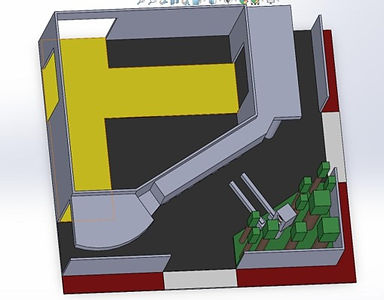
3D Design 3
Moving on to this 3D Design. We partitioned the arena to fit in our electronic component. We then added a little bit more design to see if it will disrupt our limo robot pathing